
Корректор нелинейности датчика
10.2. Корректор нелинейности датчика
В автоматических системах управления и измерительной технике используются корректирующие звенья различного назначения, в частности, для корректировки нелинейности датчиков. В качестве примера рассмотрим устройство линеаризации характеристики датчика, используемого для измерения влажности зерна и реализующего наиболее надежный и простой способ измерения сопротивления на постоянном токе. Нелинейность такого датчика проявляется в области малых значений влажности, где зависимость сопротивления от содержания влаги носит логарифмический характер [19]. Это позволяет представить эквивалентную схему датчика в виде последовательно включенных резистора Rd и диода Dd (рис. 10.5). Корректирующее звено выполнено на операционном усилителе OU, в цепь отрицательной обратной связи которого включен резистор Rk последовательно с диодом Dk. Для наблюдения эффекта линеаризации введен переключатель А, который нажатием клавиши А клавиатуры замыкает диод Dk.
Для получения передаточной характеристики рассматриваемого устройства используется функциональный генератор в режиме пилообразного сигнала и осциллограф в режиме развертки В/А, при котором выходной сигнал Uo, поступающий на вход канала В, разворачивается сигналом с функционального генератора, поступающим на вход канала А.

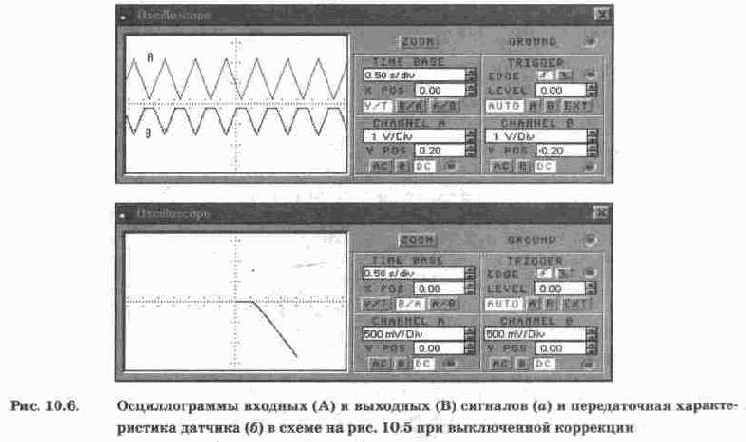
Результаты моделирования при выключенном корректирующем диоде (в положении переключателя А, показанном на рис. 10.5) приведены на рис. 10.6, из которого видны искажения, вызванные нелинейностью датчика в области небольшой влажности, т.е. при низких уровнях сигнала на выходе датчика (при анализе осциллограмм и коэффициента передачи не забывайте, что используется инвертирующий усилитель).
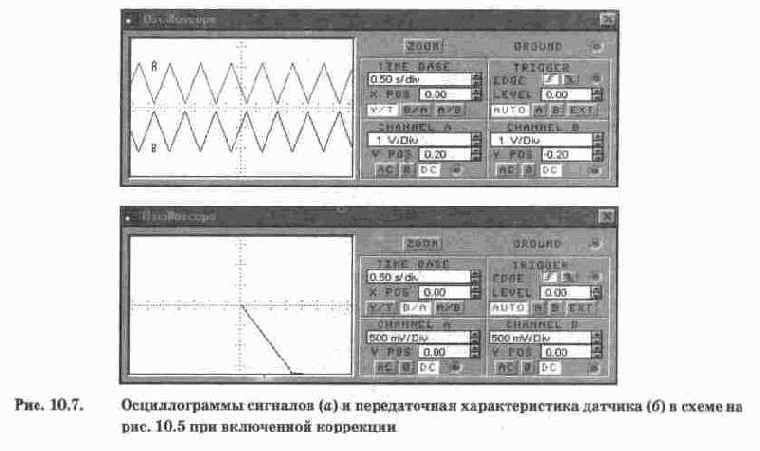
Результаты моделирования при переводе выключателя в положение, соответствующее включению коррекции, показаны на рис. 10.7, откуда видно, что исчезли искажения выходного сигнала, а передаточная характеристика не имеет характерного излома, вызванного нелинейностью датчика. Для более сложной коррекции могут быть использованы универсальные функциональные преобразователи, рассмотренные в гл. 14.
Контрольные вопросы и задания
1. С какой целью осуществляется линеаризация характеристик датчиков?
2. Из анализа данных на рис. 10.6 определите, при каких параметрах сигнала генератора получены приведенные на этих рисунках данные, если учесть, что нелинейность датчика проявляется в наибольшей степени при низких уровнях сигнала.
3. Проведите моделирование схемы на рис. 10.5 при различных типах диодов Dd и Dk. При моделировании необходимо учесть, что диоды работают в прямо смещенном режиме и их вольтамперная характеристика в таком включении описывается выражением: I=Io[exp(U/(ф)-l] или U=ln(I/Io+l), где Io — обратный (тепловой) ток; ф — температурный потенциала—n-перехода, при температуре 20° С он равен 26 мВ. Каким параметром диода в приведенной формуле необходимо варьировать, чтобы при моделировании добиться положительных результатов?
4. Проведите моделирование схемы на рис. 10.5 при сопротивлении датчика 100 Ом (учтите рекомендации п. 3).
5. Почему передаточные характеристики датчика изображены на экране осциллографа не в первом, а в четвертом квадранте?